

Tâche 2.3 : Capteurs d’humidité
Un nouveau capteur pour la mesure de la teneur en eau, la conductivité et la température du sol
L’humidité du sol joue un rôle important dans les échanges d’énergie et d’eau entre l’atmosphère et la terre, i.e. dans la zone critique. Cette grandeur est très variable dans l’espace et le temps, même à l’échelle d’un bassin versant (de moins d’un km2 à plus de 100 km2) et sur une année. Cette variabilité et son importance ne peuvent être capturées que par un ensemble de capteurs in-situ mesurant en continu l’état du sol, de préférence à différentes profondeurs sur les premiers 50 cm de sol. Ces exigences nécessitent des réseaux de capteurs simples, robustes et autonomes. Les grandeurs mesurées devront être intrinsèques au milieu, liées à son contenu en eau, et facilement disponibles. La réalisation de ces sondes bénéficie des progrès dans le domaine de l’électronique et de la technologie de l’information et de la communication. L’analyse des mesures requiert des sondes précises et fiables, c’est à dire sans biais instrumental.
De tels capteurs peuvent en outre être utilisés pour des applications professionnelles, régulation de l’irrigation, contrôle de procédés comme formation et vieillissement de bétons ou maturation de compost, suivi de l’humidité de silos… Ces utilisations ont moins besoin des données, mais la nature des milieux, souvent très conducteurs, rend la mesure plus sensible aux biais.
Pour satisfaire ces différents usages nous développons dans la cadre du WP 2.3 une gamme de sondes utilisant le même principe (Fig. 1). Des tests en terrain pour les deux premiers prototypes sont en cours comme sur un bassin versant dans les Alpes du sud (l’observatoire de recherche en érosion de Draix Bléone). Les retours d’expérience bénéficient aux développements de capteurs plus adaptés aux besoins.
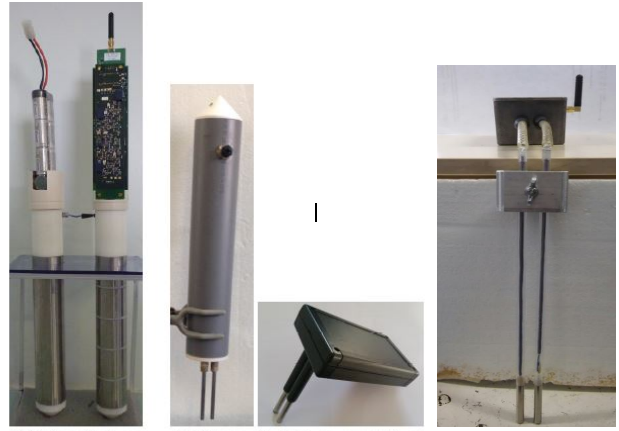
Fig. 1 : différents designs pour un même principe, depuis la sonde multi-voies jusqu’à trois différentes sondes mono-voie.
Principe de mesure
La mesure directe et standard – pesages et séchage en étuve – fournit le contenu en masse d’eau dans le sol, mais est trop destructrice et laborieuse pour un suivi in-situ et en continu. Une alternative très prometteuse se base sur la sensibilité de la permittivité diélectrique du sol à son contenu en eau. La permittivité mesure la capacité des dipôles électriques du milieu à réagir à un champ électrique induit par la sonde. La grandeur normalisée, εr, pour l’eau à 20°C est εr = 80, dû à ses molécules dipolaires, alors qu’elle est de εr = 2 à 5 pour un sol sec, et εr = 1 pour l’air.
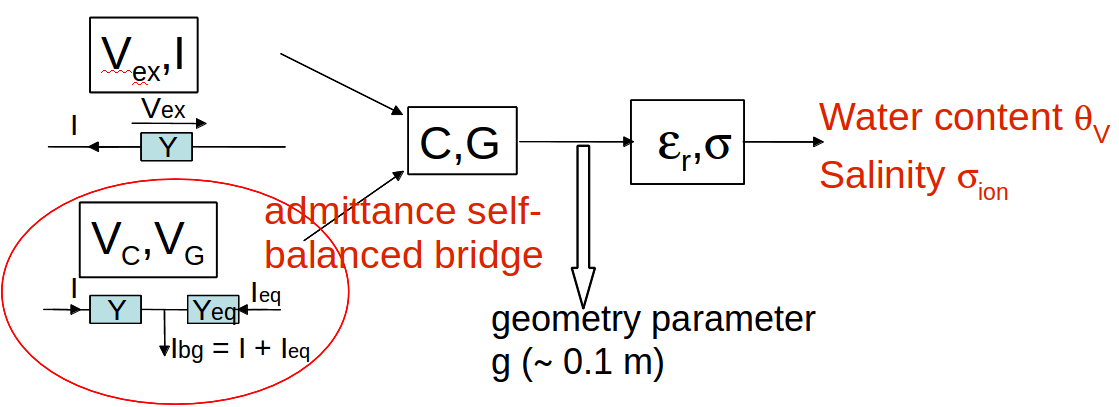
Fig. 2 : chaîne de conversions du signal de sonde – tensions VC et VG du pont auto-équilibré – au contenu en eau du sol et de sa salinité. εr et σ sont les permittivité et conductivité effectives du sol tandis que C et G sont la capacité et la conductance des électrodes de la sonde dans le sol, formant l’admittance Y.
Beaucoup de capteurs ont déjà été développés suivant ce principe de sensibilité. En réalité chacun utilise une technique de mesure propre: temps de vol d’une onde électromagnétique le long d’un guide dans le sol, ou détermination de la capacité électrique des électrodes de la sonde dans le sol soit par la fréquence d’un circuit oscillant, soit le cycles de charge et décharges dans un condensateur, soit encore le coefficient de réflexion d’une onde dans un coaxial… Ces techniques permettent un développement commercial, mais les sondes sont plus facilement sujettes à des biais instrumentaux du fait de leur détermination de la permittivité trop indirecte. Toute variation du signal de l’instrument due à un autre paramètre que celui de l’humidité du sol provient, soit de l’influence sur εr d’autres facteurs du sol, comme sa température ou sa composition, soit d’une influence directe sur le signal indépendamment de la valeur de εr,- le biais -, soit, pire, des deux. Une forte conductivité σ du milieu, qui provient surtout des charges libres du milieu, modifie en particulier le signal. Une solution consiste à corriger le signal de ses biais, à condition de mesurer les paramètres perturbateurs en particulier σ . Une majorité de fabricants des capteurs ont ajouté sur leurs tout récents produits la possibilité de mesurer σ, cependant, soit indépendamment de la mesure de εr, soit avec une faible précision. La température est aussi mesurée.
La mesure de ces deux grandeurs fournit par ailleurs des informations supplémentaires sur les processus des milieux.
Pour réduire ces biais instrumentaux, la technique utilisée repose sur un pont auto-équilibré d’admittance qui détermine plus directement εr et, simultanément, σ (Fig. 2). Il fonctionne avec des champs et tensions alternatifs à une fréquence fixée entre 1 et 32 MHz. Au 1er ordre la relation entre les signaux du pont, les tensions continues VC et VG, et les grandeurs intrinsèques du milieu est :
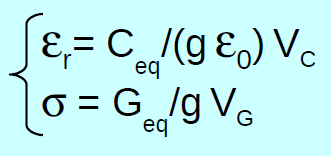
Les coefficients de sensibilité du pont, Geq et Ceq, sont fixés par des composants entre 3,0 et 50 mS/V, et entre 20 et 30 pF/V, respectivement, suivant les applications. Le paramètre g dépend de la géométrie des électrodes et varie dans notre cas de 0,12 à 0,15 m. Les tensions du pont présentent une grande résolution de +/- 0,2 mV pour une gamme allant jusqu’à 3,5 V. Elles sont facilement digitalisées en conservant la résolution. Après correction des effets parasites de l’instrument, le capteur couvre une gamme de 0 à 1 S/m pour σ (ou 0 à 150~mS pour G) et une gamme de 1 à 100 pour εr (à peu près celle pour C en pF), avec une précision de +/-(1 + 1 % σ) mS/m pour σ et +/-(0,1 + 1 % εr) pour εr. Fig. 3 montre la précision pour les faibles valeurs de permittivité et conductivité obtenue à l’aide de sable sec.
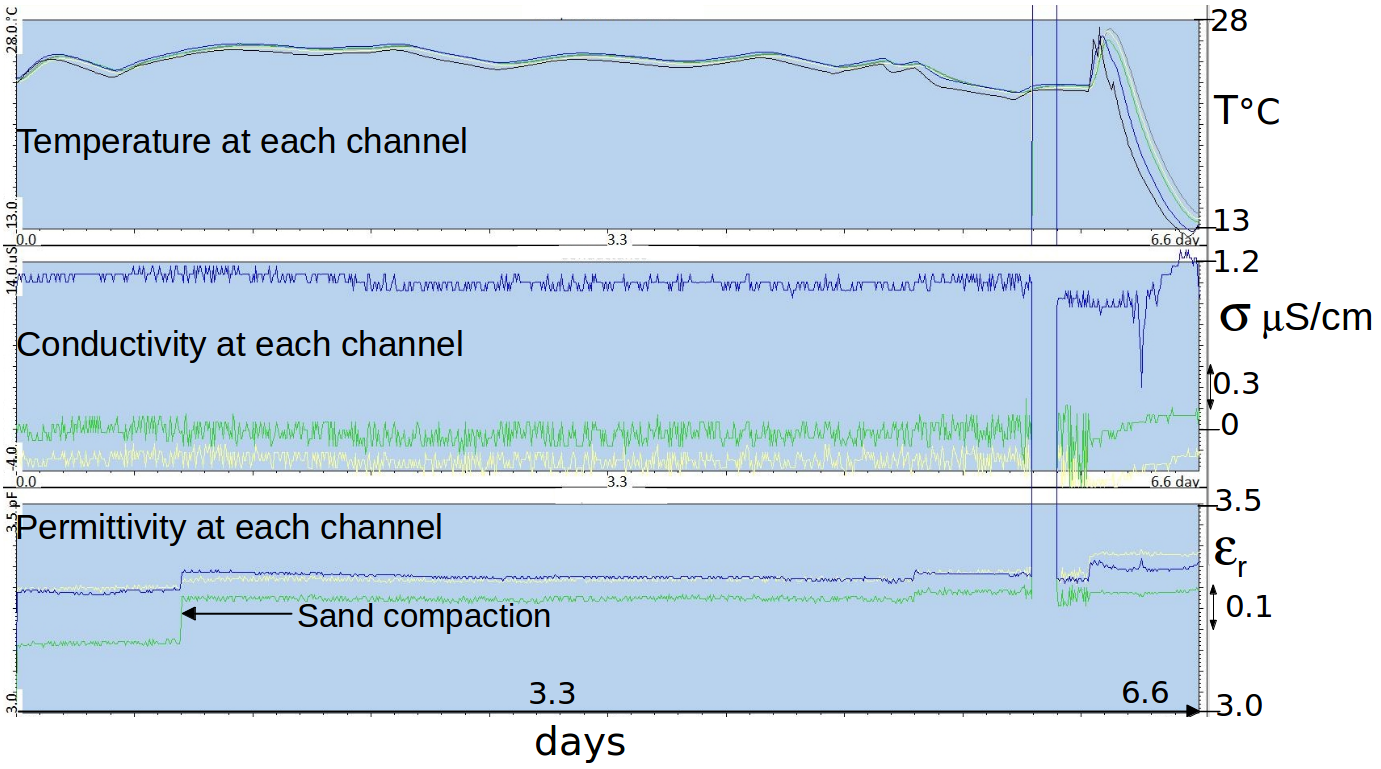
Fig. 3 : précisions pour les faibles valeurs de permittivité et de conductivité obtenues à l’aide de sable sec. Test de sensibilité de l’électronique à la température en fin de série. Vue de l’Interface Homme Machine sur ordinateur.
Capteurs autonomes en communication sans fil
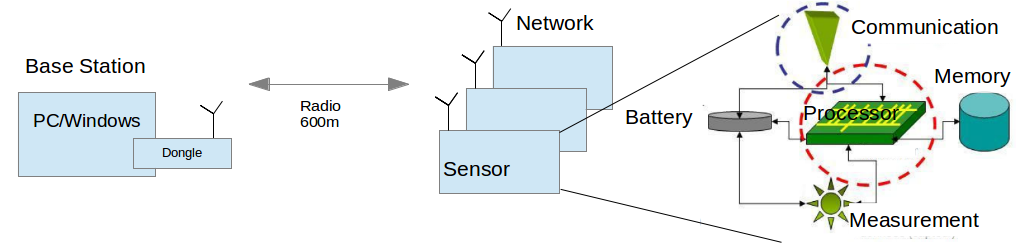
Fig. 4 : principales caractéristiques d’un réseau radio de capteurs autonomes, depuis le processeur jusqu’à la station centrale consistant en un ordinateur.
Fig. 4 montre les principales caractéristiques d’un réseau radio de capteurs autonomes, tel que mise en place pour nos sondes. Un processeur et son logiciel embarqué commandent les différentes opérations du capteur (acquisitions programmées, pré-traitements, mise en mémoire, communication…). La mémoire permet de stocker plus de 200 jours de mesures pour acquisition d’un point toutes les 15 minutes, dans le cas du capteur multi-voies composé de deux ponts – pour des études de l’influence de la fréquence -. Un ordinateur équipé d’un dongle – la station centrale – supervise le réseau de capteurs et chacun d’eux. Il permet de visualiser les données transférées de chacun (Fig. 3 et 4).
Dans le cas d’applications plus simples comme le contrôle de l’humidité et des nutriments dans les sols des serres un prototype bon marché est conçu avec une connexion à la demande (sans fil ou non).
Essais de terrain et perspectives
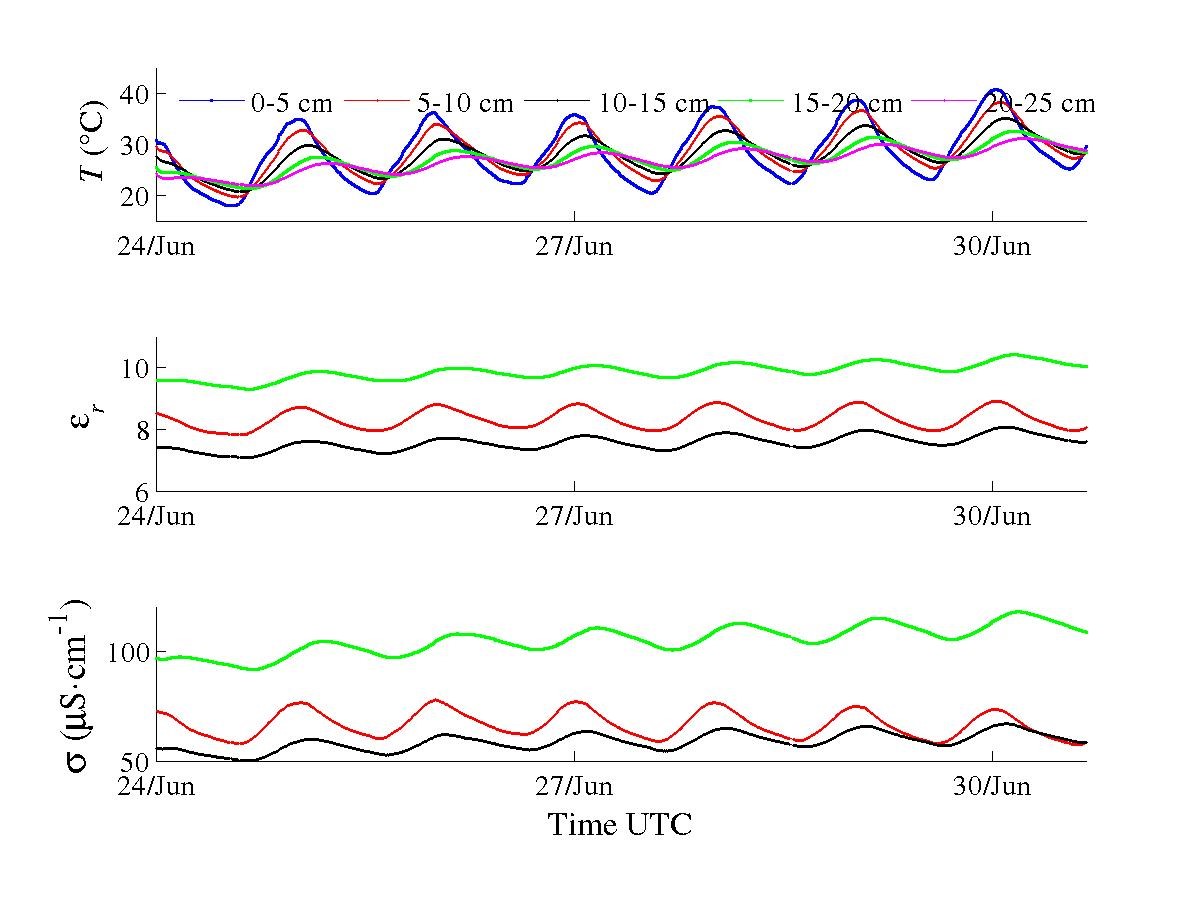
Fig. 5 : séries temporelles à différentes profondeurs d’un capteur multi-voies dans un sol de sable et d’un peu d’argile durant une période sèche et chaude (suite de la série sur Fig. 3). Cycles diurnes de la température du sol et influence sur la permittivité et la conductivité du sol à chaque profondeur.
Fig. 5 et 6 présentent des séries temporelles obtenues avec un capteur multi-voies et un capteur mono-voie dans différentes conditions. La permittivité et la conductivité apparentes du sol suivent bien à chaque profondeur l’état hydrique du sol, qu’il soit sec ou humide avec une précipitation pluvieuse. Dans les deux situations εr et σ sont corrélées positivement avec les cycles diurnes de la température du sol, en particulier en condition sèche. La corrélation pour σ est liée à l’augmentation physique de la conductivité de l’eau de pore avec la température, alors que l’effet sur εr résulte probablement de l’eau liée, et de ses dipôles, dont la contribution s’accroît en sol sec.
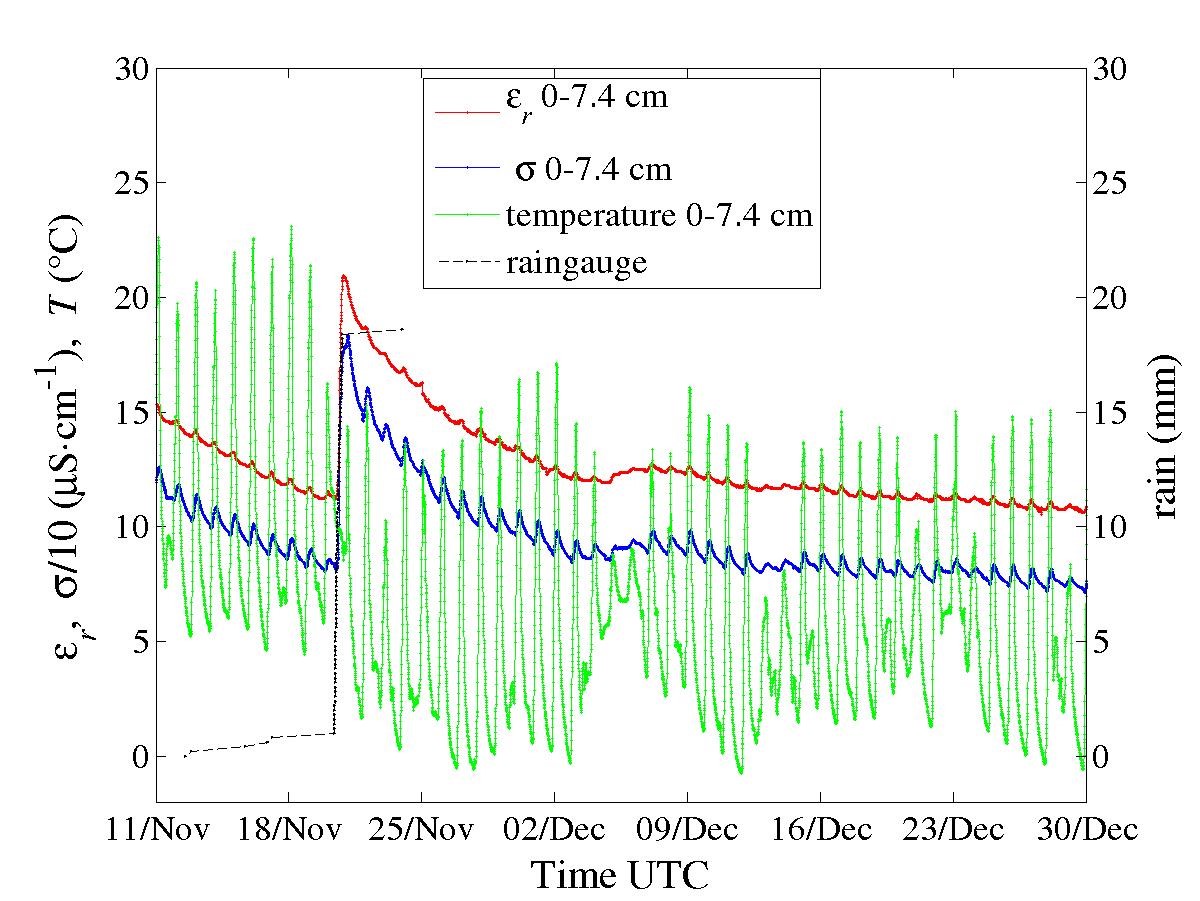
Fig. 6 : séries temporelles des mesures d’un capteur mono-voie sur les 7 premiers cm d’un sol marneux dans un observatoire de moyenne montagne durant une période humide.
Fig. 7 montre un développement en cours d’un prototype autonome simplifié en communication radio, avec un minimum de perturbation.