WP5 – Explorer la surface
Exploration par drône
Le Work-Package WP5 a pour objectif de développer un système d’imagerie hyperspectrale par drone. En effet, l’imagerie hyperspectrale présente un important potentiel pour la recherche environnementale, qu’il s’agisse de l’étude de l’atmosphère, des sols, de la biomasse, ou des eaux continentales et littorales.
Par comparaison aux images satellites ou aéroportées, les plateformes drones permettent d’atteindre une résolution plus fine, tout en offrant une plus grande souplesse d’utilisation et un coût plus modéré. Des caméras hyperspectrales légères et compactes, susceptibles d’être embarquées sur drone sont désormais disponibles. A l’heure actuelle, la majorité de ces capteurs s’appuie sur une technologie push-broom, difficilement compatible avec les mouvements peu contraints d’un drone. Les données acquises doivent donc être corrigées géométriquement afin qu’un cube hyperspectral puisse être généré.
Le drône HyperDrelio
Le drone HyperDrelio est développé dans le cadre de Critex par les laboratoires « Géosciences Océans » (UBO, IUEM, CNRS – Brest), « Laboratoire de Géologie de Lyon » (Univ. Lyon 1, OSU de Lyon, CNRS) et l’EPFL (Ecole Polytechnique Fédérale de Lausanne). La plateforme est un drone multi rotors électrique octocoptère, conforme à la règlementation DGAC pour des scénarios en vol à vue type S1 et S2.
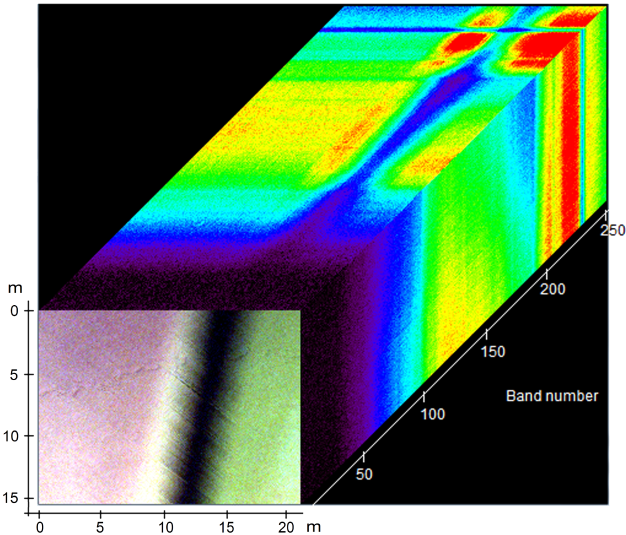
HyperDrelio est équipé d’une caméra hyperspectrale MicroHyperspec® (Headwall®) avec un capteur VNIR (400-1000 nm) enregistrant 250 bandes avec une résolution spectrale de 1,85 nm. Cette caméra compacte (770 g) s’appuie sur une technologie pushbroom. L’image est donc acquise ligne à ligne au fur et à mesure du déplacement. En parallèle de l’acquisition hyperspectrale, des photographies RGB sont acquises par une caméra iDS© uEye. Le drone est également équipé de capteurs de position et d’attitude (GPS différentiel RTK et centrale inertielle) permettant a posteriori de corriger géométriquement les données hyperspectrales.
A partir des photographies RGB, une ortho-image et un Modèle Numérique de Terrain (MNT) de la zone sont générés. Un algorithme est développé afin de coupler les données issues des différents capteurs proprioceptifs et les informations sur la topographie de la zone (MNT) et ainsi recaler les lignes hyperspectrales les unes par rapport aux autres, mais aussi les géoréférencer.
Une fois les données corrigées géométriquement et calibrées spectralement, un cube hyperspectral est construit. Il s’agit d’une représentation 3D d’une zone, la troisième dimension représentant l’information spectrale pour chacune des bandes spectrales enregistrées.